规划顺利登陆火星
尽管自1976年维京计划首次执行地面任务以来,美国宇航局已成功在火星上执行了九次机器人任务,但将人类安全地带到火星将需要穿越火星大气层的新技术。但这些技术和系统无法事先在地球上进行全面测试。
自2019年以来,NASA科学家团队及其合作伙伴一直在位于能源部橡树岭领导计算设施(OLCF)的超级计算机上使用NASA的FUN3D软件,对人类规模的火星进行计算流体动力学(CFD)模拟着陆器。OLCF是能源部科学办公室用户设施,位于能源部橡树岭国家实验室。
该团队正在进行的研究项目是确定如何将载人飞行器安全降落到火星表面的第一步。
“就本质而言,我们没有这方面的验证数据。我们可以在风洞或弹道靶场等地面设施中进行有价值但有限的测试,但这种方法无法完全捕捉火星上将遇到的物理现象“我们无法在实际的火星环境中进行飞行测试——当我们到达那里时,要么全有要么全无。这就是超级计算如此重要的原因。”美国宇航局兰利研究中心的高级研究科学家、该项目的首席研究员埃里克尼尔森说。OLCF五年的努力。
与最近的火星任务不同,降落伞不是行动的一部分。相反,将人类送上火星的主要候选方案是逆向推进——发射内置于飞船隔热罩中的前向火箭来减速。
“我们以前从未飞过这样的飞机。从一开始的根本问题就是,‘我们能够安全地控制这架飞机吗?’”尼尔森说。
美国宇航局正在研究逆向推进而不是传统降落伞的原因是一个物理问题。以前的火星登陆器重约1吨;载有宇航员及其所有生命支持系统的飞行器的重量将增加20至50倍,大约相当于一栋两层楼房的大小。火星稀薄的大气层——密度大约是地球大气层的100倍——无法支持如此大型飞船的降落伞着陆。
NASA团队成员表示:“使用传统飞行器,我们会飞过一个非常干净、可预测的环境。有了这个概念,所有这些都被抛到了九霄云外,我们将穿越一个由高能火箭废气组成的极其动态的环境。”和CFD专家GabrielNastac。
在NASA任务规划人员的指导下,该团队制定了一项多年计划,其中包括针对可控性关键问题的日益复杂的模拟。
2019年,该团队在Summit超级计算机上以高达100亿个元素的分辨率进行了CFD模拟,以表征预期油门设置和飞行速度从2.5马赫到0.8马赫(需要车辆火箭发动机的条件)下的静态车辆空气动力学特性用于初始减速。
整个2020年,密集的代码开发工作重点是将FUN3D的通用反应气体功能移植到Summit的图形处理单元或GPU加速器。
“在基于GPU的计算环境中,面对复杂的物理内核,实现非结构化网格CFD求解器的高效性能是一个巨大的挑战。但我们最终能够重组关键代码段,以提供我们所追求的性能”,领导该团队多架构软件开发的NASA研究计算机科学家AaronWalden说道。
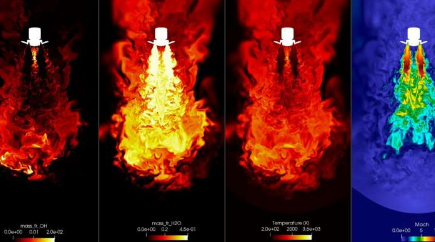
这项工作为2021年的一项重要活动奠定了基础,使该团队能够解决液氧/甲烷火箭发动机与火星大气(主要由二氧化碳和氮气组成)之间的复杂相互作用。在Summit上使用15,000-20,000个GPU进行的每次模拟都会产生PB(相当于1,000TB)的输出数据,从而深入了解车辆空气动力学与使用先前模拟的完美气体假设观察到的关键差异。
在2022年的活动中,该团队向前迈出了一大步,将最先进的NASA飞行力学软件(称为“优化模拟轨迹II程序”(POST2))纳入工作流程中。该团队现在超越了假设静态飞行条件的模拟,而是寻求在虚拟超级计算环境中“飞行”飞行器。该测试将首次尝试量化和解决在实际动力下降到火星表面期间会遇到的关键不稳定动力学。
该团队招募了来自佐治亚理工学院航空航天系统设计实验室的关键专家;该小组由布拉德·罗伯逊领导。这些专家已经花了几年时间开发一种耦合算法,用基于物理的实时FUN3D模拟取代POST2中的低阶空气动力学模型,最终实现利用复杂飞行控制算法的高保真轨迹模拟。
“将FUN3D和POST2结合起来是一个相当大的挑战。我们必须处理五六个参考系以及它们之间的数据转换。但回报是能够采用其他NASA工程师在详细引导、导航、控制方面所做的所有艰苦工作。团队成员扎克·恩斯特(ZachErnst)说道,他当时是佐治亚理工学院的博士生,他与NASA研究生实习生海登·迪恩(HaydenDean)合作。
合并POST2带来了额外的挑战。由于POST2受到比FUN3D更严格的出口管制法规的约束,团队成员KevinJacobson的任务是开发一种远程耦合范例,其中POST2将在NASA设施上执行,同时与OLCF中领先规模运行的FUN3D进行实时通信。
建立和维护这种连接,同时考虑防火墙、网络中断和作业调度程序带来了许多挑战。这项工作需要与两个设施的网络安全人员和系统管理员进行大约一年的规划和协调。
当团队实现了在虚拟环境中完成大部分下降阶段的长期目标时,额外的努力得到了回报。
对于该项目来说,OLCFFrontier超级计算机的到来恰逢其时。随着百亿亿级计算能力(每秒五亿亿次或更多计算)现已成为现实,团队有能力重新引入所需的物理模型和在项目生命周期中学到的其他经验教训。
2023年,该团队专注于他们多年前所希望的终极模拟:利用世界上最强大的超级计算系统进行真正自主的闭环试飞。
当制导系统瞄准指定着陆区时,八个主发动机用于控制俯仰(上下旋转)和偏航(左右旋转),POST2还发出命令指示FUN3D定期发射四颗主发动机。反应控制系统(RCS)模块沿着陆器背面圆周排列,用于在飞行中执行滚转校正。
负责RCS模型开发的佐治亚理工学院的AlexHickey表示:“这些功能对于评估未来车辆的可控性至关重要。”
该团队的长期目标于2023年底成为现实,OLCF工作人员在两周内协助Frontier大规模协调一系列高优先级工作。
尼尔森说:“我们第一次能够回到在自主飞行中安全控制此类飞行器的最初问题。”“在典型的航空航天CFD模拟中,人们可能会计算一两秒的物理时间。在这里,Frontier使我们能够成功进行35秒的受控飞行,从8公里(约5英里)高度下降到约1公里(0.6英里)高度)当车辆接近着陆阶段时。
尼尔森补充道:“分辨率、物理建模和时间持续时间超出了我们在传统高性能计算系统上所能尝试的任何水平。”OLCF提供的机会和世界一流的专业知识。”
免责声明:本答案或内容为用户上传,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 如遇侵权请及时联系本站删除。