通过绘制轨迹来教机器人移动
让机器人执行即使是简单的任务也需要大量的幕后工作。挑战的一部分是规划和执行动作,从转动轮子到举起机械臂。为了实现这一目标,机器人专家与程序员合作开发一组无障碍且机器人可行的轨迹或路径。
卡内基梅隆大学机器人研究所 (RI) 的研究人员正在创造新的方法来绘制这些轨迹。
Williamzhi,RI 的博士后研究员,与博士一起工作。学生张天一和 RI 主任 Matthew Johnson-Roberson 提出了一种使用草图向机器人展示如何移动的方法。该团队将在日本横滨举行的 IEEE 国际机器人与自动化会议上展示他们的工作,该工作已发布在arXiv预印本服务器上。
“生成机器人运动轨迹的传统方法需要对机器人进行特定编程,”Zhi 说。 “人类可以通过草图推断出复杂的指令。我们寻求让机器人也能做到这一点。”
最近,已经有研究使用自然语言来控制机器人的初步工作,但研究人员主要是通过演示来测试教机器人学习的不同方法。
有两种主要方法可以解决这个问题。一种方法依赖于动觉教学,人类记录机器人的行进方向,然后对机器人进行物理调整,将其关节放置在所需的位置。另一种方法是远程操作,用户使用专门的遥控器或操纵杆操纵机器人,然后记录演示以供机器人复制。
这两种方法都有其缺点。具体来说,动觉教学要求用户与机器人处于同一空间。更值得注意的是,手动调整某些机器人很困难,而且这种难度只会随着移动机器人而增加,例如带有手臂的四足机器人。远程操作要求用户进行精确的控制,并且需要时间来让机器人完成其步伐。
RI 团队绘制轨迹的方法教会机器人如何移动,而没有动觉教学或远程操作的缺点。在这种新颖的方法中,机器人通过在其工作环境图像上绘制的动作来学习。
为了捕捉环境图像,团队将摄像机放置在两个位置,从不同的角度拍摄照片。然后,他们在图像上绘制了机器人所需运动的轨迹,并将 2D 图像转换为机器人可以理解的 3D 模型。他们通过一种称为光线追踪的技术来完成这种转换,该技术利用物体上的光和阴影来估计它们与相机的距离。
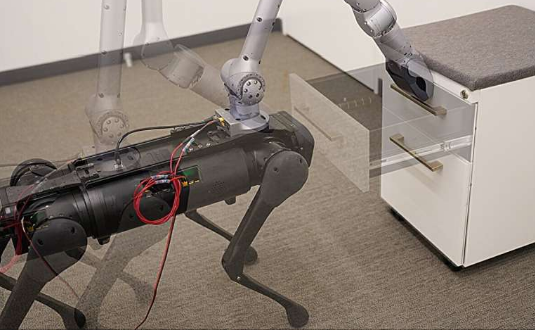
团队生成 3D 模型后,将其交给机器人进行跟踪。对于配备机械臂的四足机器人,研究人员在他们拍摄的每张照片上绘制了三个运动轨迹,展示了手臂应该如何移动。他们使用光线追踪将图像转换为 3D 模型,然后手臂学会在现实世界中遵循这些轨迹。
利用这种技术,该团队训练了四足机器人关闭抽屉、画出字母“B”、翻倒盒子等等。他们还对机器人进行了编程,使其在某些轨迹的末端打开其抓手,从而使其能够将物体放入盒子或杯子中。此外,他们可以将他们教给机器人的动作推广到许多不同的任务中。
“我们能够教机器人做某事,然后将其切换到不同的起始位置,它可以采取相同的动作,”支说。 “我们可以获得相当精确的结果。”
目前,该方法仅适用于具有刚性关节的机器人,不适用于软机器人,因为它需要考虑关节角度以及它们如何对应于空间中的各个点。但处理硬件也面临着一系列挑战。在他们的实验中,四足动物有时会在执行诸如伸出手臂关闭抽屉之类的动作后失去平衡。这是团队正在为该程序的下一次迭代研究的参数之一。
“该领域的人们更加关注从演示中生成更好运动的算法。这项研究是我们使用轨迹草图来指导机器人的开端,”Zhi 说。 “我们设想在制造环境中,如果有人不擅长对机器人进行编程,他们只需在 iPad 上画草图,然后与机器人进行协作,这就是这项工作未来可能发展的方向。”
免责声明:本答案或内容为用户上传,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 如遇侵权请及时联系本站删除。