磁力驱动软体机器人实现高速跳跃
导读 从昆虫到两栖动物和鱼类等许多动物物种都以跳跃作为在周围环境中移动的手段。跳跃对这些动物来说非常有利,例如,让它们能够到达更高的树枝
从昆虫到两栖动物和鱼类等许多动物物种都以跳跃作为在周围环境中移动的手段。跳跃对这些动物来说非常有利,例如,让它们能够到达更高的树枝、迅速逃离捕食者或更快地穿越长距离。
许多机器人专家一直在尝试开发能够复制动物跳跃运动方式的机器人,因为这些机器人可能具有有趣的现实世界应用。通过跳跃,机器人可以在复杂的地形上移动得更快,并进入它们原本无法到达的表面或环境。
近年来推出的跳跃机器人采用各种驱动方法,包括介电弹性体、液晶弹性体和软致动器。虽然其中一些机器人取得了令人鼓舞的成果,但大多数机器人被发现在跳跃高度和速度方面都落后于跳跃能力极强的生物体。
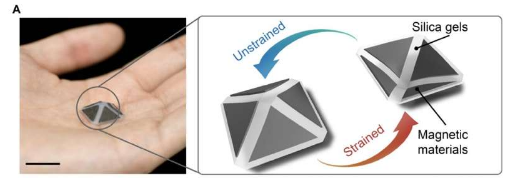
中国浙江大学的研究人员最近开发出一种新型超快磁驱动双稳态软跳跃器,该跳跃器展现出了先进的跳跃能力。该跳跃器发表在《科学机器人》杂志上,研究人员发现,它能够实现不同的跳跃运动方式,比过去推出的同类机器人系统跳跃得更高、更快。
图片来源:唐道凡
软跳伞器,例如这些研究人员开发的系统,是基于弹性和可变形的材料制成的,这些材料通常具有更大的抗冲击性,可防止机器人在跳跃时受到损坏。然而,许多现有的基于软材料的跳伞器在对刺激的反应速度和从地面起飞的速度方面被发现是有限的。
郑重声明:本文版权归原作者所有,转载文章仅为传播更多信息之目的,如作者信息标记有误,请第一时候联系我们修改或删除,多谢。